
환경 세팅
PC: Jetson AGX Xavier NX
OS: Ubuntu 18.04
ROS: ROS1 Melodic
SLAM Algorithm: LeGO-LOAM
구현 시작하기 전 생각해야할 것
SLAM의 목적성
쓰임새와 이름 그대로 Localization과 Mapping을 통해 가상의 환경을 만든다.
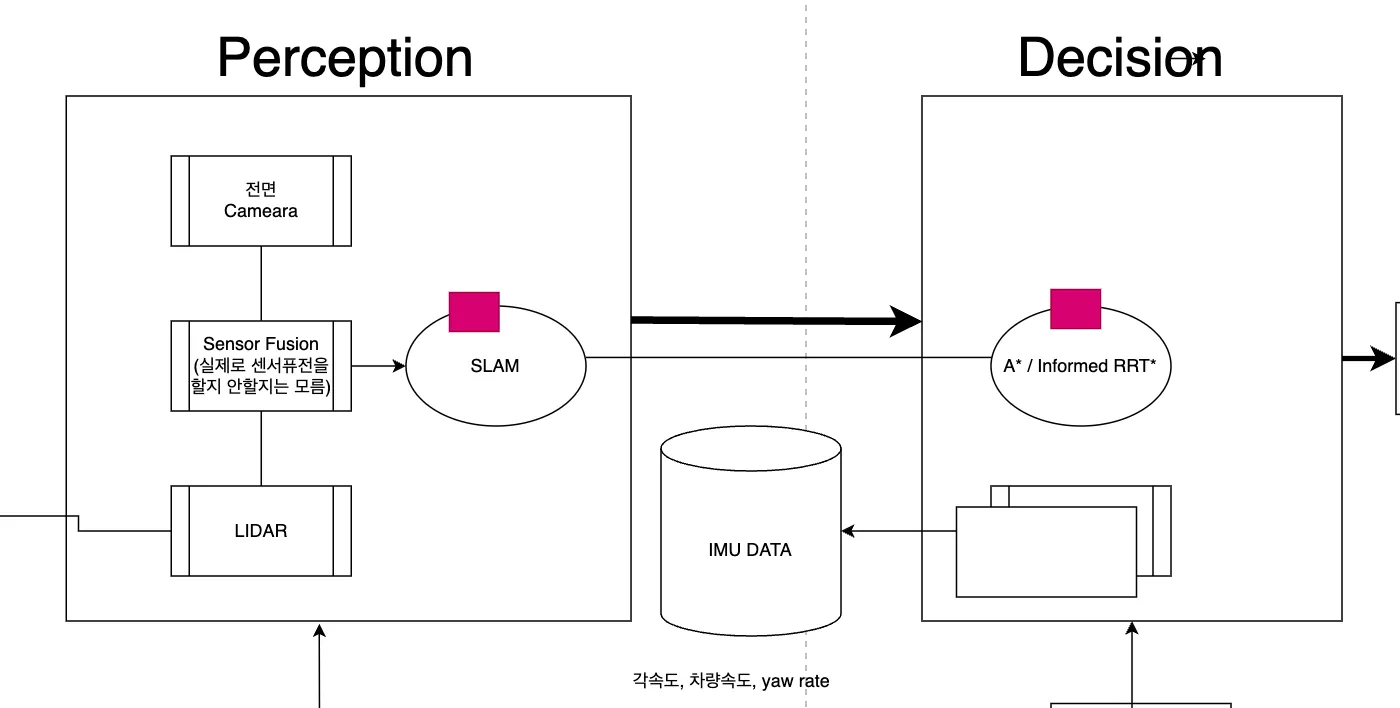
만든 환경을 토대로 Decision 단계에서 Path Planning 알고리즘이 적용이 된다.
왜?
자율주행차는 특정 목적지를 향해 이동을 하는데 최적을 경로를 통해 움직이게 된다.
이 최적의 경로를 만들기 위해서는 지도가 있어야 하는데 SLAM이 이 지도를 생성하여 경로를 짤 수 있게 해준다.
•
LeGO-LOAM 선정 이유
◦
◦
예상되는 Bottleneck
1.
LiDAR setting - Velodyne VLP-16의 기본 세팅을 어떻게 해줘야 하느냐(LeGO-LOAM논문에서 같은 모델의 LiDAR와 PC를 사용)
2.
데이터 전처리 - Velodyne VLP-16 에서 받아오는 데이터를 어떻게 전처리하여 LeGO-LOAM의 Input으로 넣어주느냐.
3.
데이터 후처리 - LeGO-LOAM을 통해 만든 Map의 형태는 어떠하며 Path Planning을 하기 위해 어떤 식으로 후처리를 해줘야 하느냐.
4.
성능개선 - 퀄리티가 좋지 않을 경우 좋게 하기 위해 어떤 방식을 생각해볼 수 있을까?
5.
IMU - IMU 데이터까지 활용하게 된다면 코드를 어떻게 수정해야하며 IMU과의 통신은 어떻게 해야할까?(IMU 정말 생소해서 시간이 많이 소요될 듯)
일단 린하게 깃허브 따라가면서 실행을 목표로 돌리기
ref.